Home/Projects
About
Contact
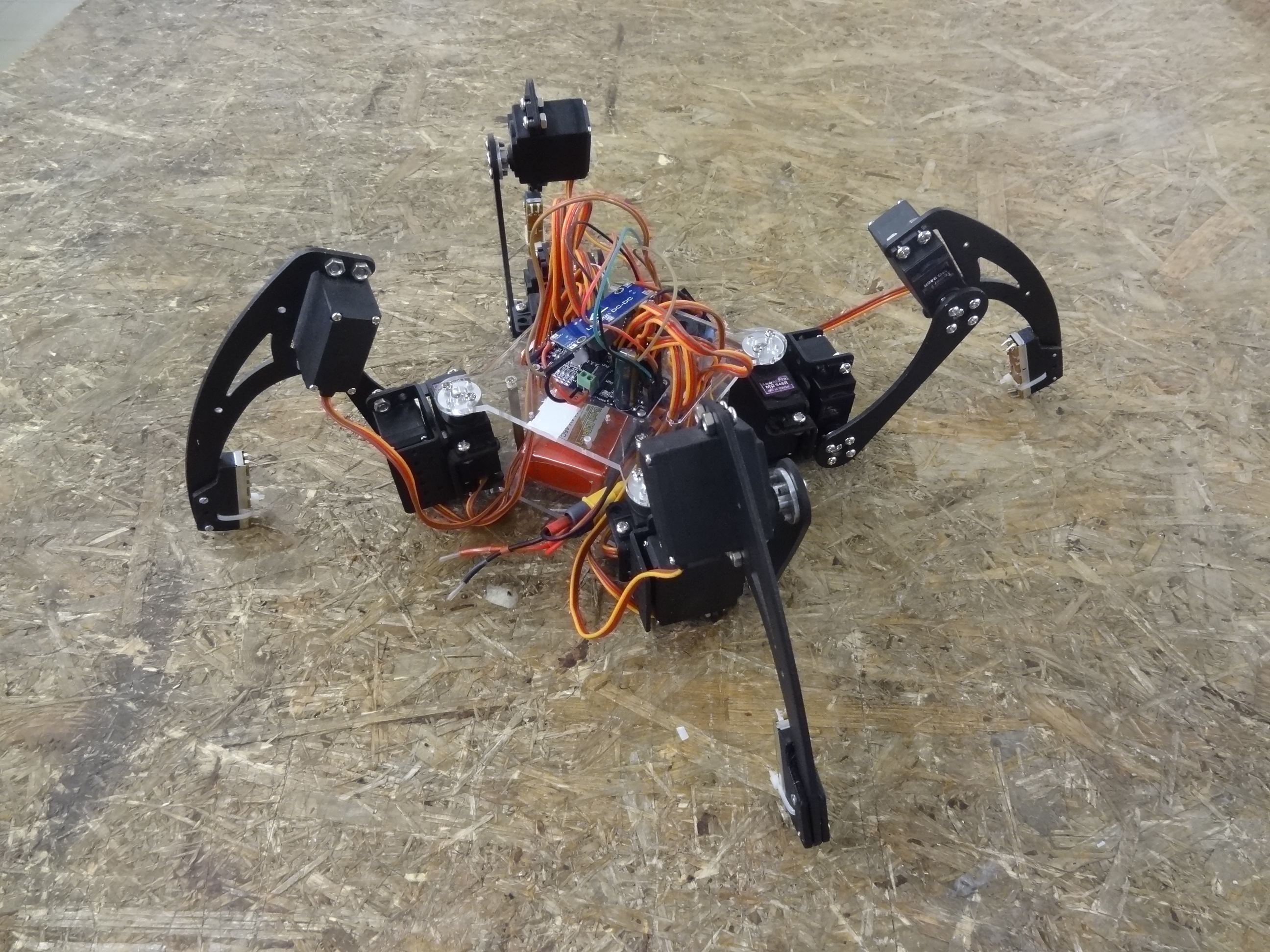
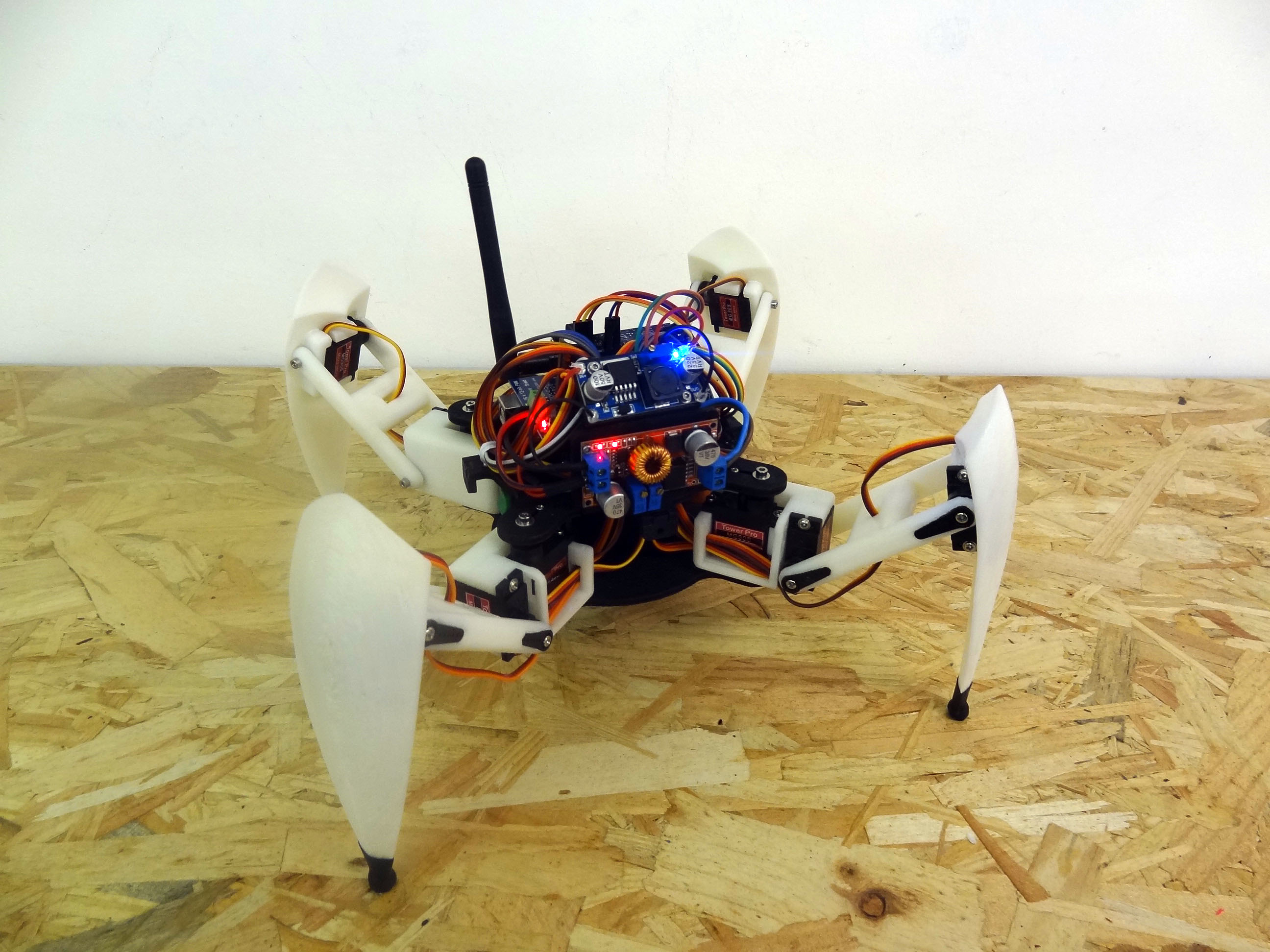
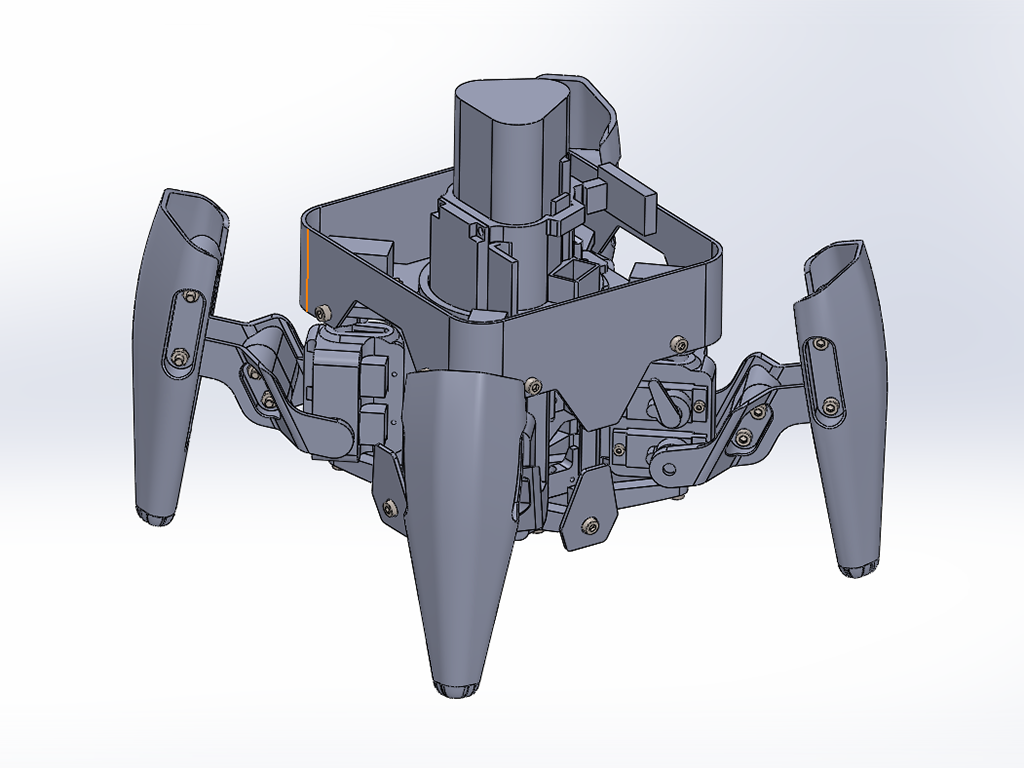
Quadruped robot
A quadruped robot project and an exercise on inverse kinematics. The aim is to create a bigger robot capable of walking autonomously on uneven terrain.